Machinistを試してみる -ラズパイを用いた超音波距離センサデータのアップロード-
今回はラズパイを用いて超音波距離センサのデータをMachinistにアップロードするプログラムを作成します。
実行環境
- Raspberry Pi 4 Model B
- python 2.7.16
- 超音波距離センサ:A02YYUW
- シリアル変換モジュール:Rasbee CP-2102
超音波距離センサ
- モデル:DYP-A02YY-V1.0
- 電圧: 5V
- 測定範囲:3cm-450cm
- 通信:UART
- 測定精度:±(1 + S * 0.5%)/±(1+S*0.3%)CM(Sは測定距離)
")
www.mouser.jp
ラズパイと超音波距離センサとの接続方法
ラズパイと超音波距離センサはUARTで通信させます。今回はシリアル変換モジュールを利用します。

超音波距離センサのピンアサインは以下のサイトから確認
1:VCC Power Input
2:GND Ground
3:RX Processed Value/Real-time Value Output Selection
4:TX UART Output
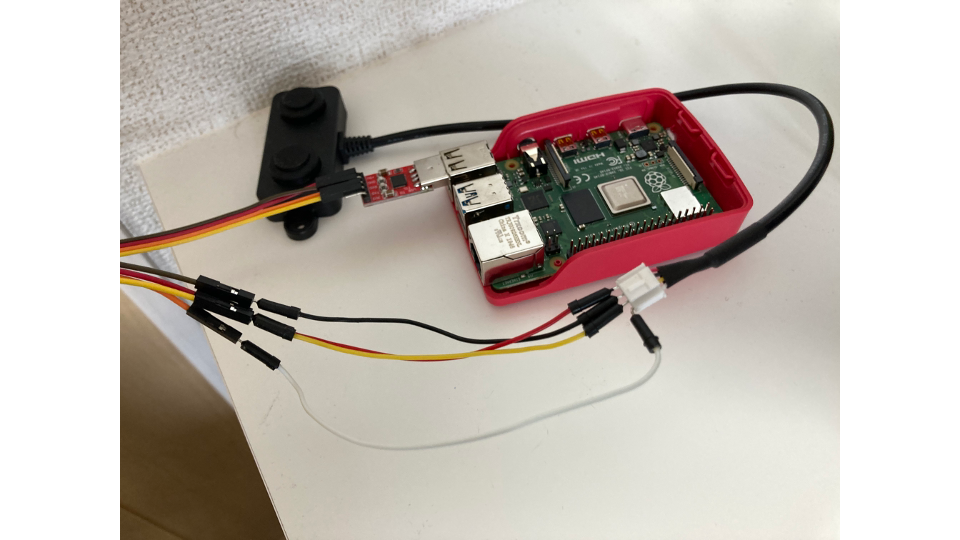
実際にラズパイと超音波距離センサを接続すると以下のようになる
シリアル変換モジュール (ジャンプワイヤーの色)
5v :赤
GND:黒
RX:橙
TX:黄

超音波距離センサ (ジャンプワイヤーの色)
5v :赤
GND:黒
RX:黄色
TX:白

センサデータ取得とMachinistへのデータアップロード
超音波距離センサのデータを取得するため以下のリポジトリのコードを使用する
github.com
また、Machinistへデータアップロードするため前回の記事の内容を流用する
Machinistを試してみる -pythonでデータをアップロード- - IT×農家の長男
ホームディレクトリまたは作業用ディレクトリで以下のコマンドを実行する
git clone https://github.com/DFRobot/DFRobot_RaspberryPi_A02YYUW.git
cd DFRobot_RaspberryPi_A02YYUW/raspberry
touch upload_distance.py 以下のソースコードをコピーし、upload_distance.pyにペーストする
このプログラムは1ループ毎にデータの取得を行い、1分毎に直近の取得データをMachinistにアップロードするもの
プログラムの実行には以下のコマンドを入力する
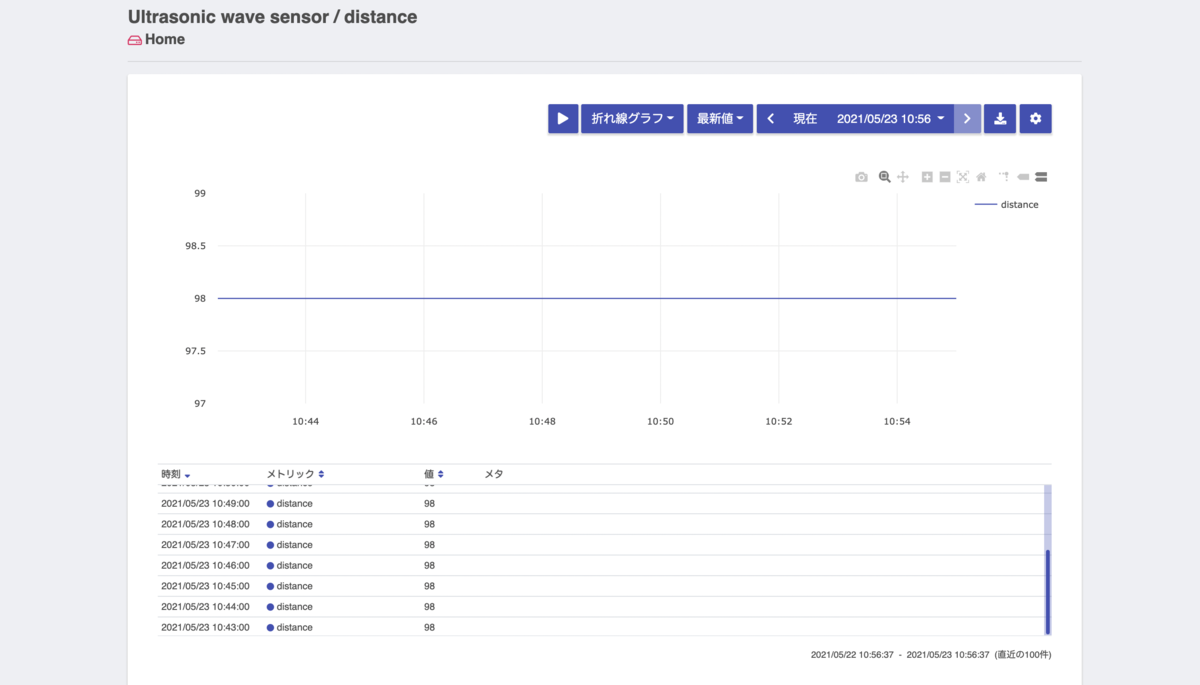
python upload_distance.pyデータの確認
10cmの位置に箱を設置して、データを計測した。

プログラム実行結果
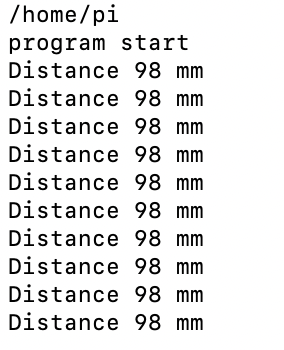
平均誤差2mmの結果となった